TinS-25G高速履带式机器人底盘
TinS-25G 是全新设计的高速机器人底盘,配备了升级的减震系统。
◆ 应用
广泛应用于安全防护监控、机械臂搬运车、升降平台、运输车辆等领域,配备自主导航和驾驶传感器后,它可用于危险区域的无人侦察。
特点:
1. 结构性能:底盘整体履带结构采用平行四边形设计,具有较高的离地间隙、较强的越障能力、较长的履带接地面积、优异的爬楼梯能力和较强的户外越野能力。前后履带均可包裹车身,更有利于保护车辆免受损伤,并使其能够在各种地形上行驶。
2. 通信协议:485通信、CAN协议。支持定制和二次开发。
3. 橡胶履带:抓地力强,履带接地面积大。
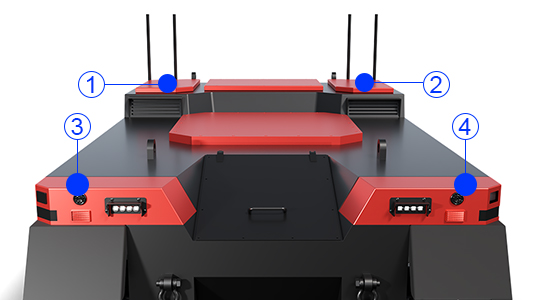
4. 全向天线用于定向。
5. 驱动轮配备盘式制动器和 ABS 防抱死制动系统。
6. 远近光切换控制,方便夜间行驶。
7. 两种可选供电方式:100% 纯电动
动力系统:E-POWER 动力系统由智能发电系统、电机、逆变器和锂电池组成。前端柴油发动机或汽油发动机发电,后端则为 100% 纯电动驱动,在保留纯电动驱动优势的同时,延长了底盘的连续工作时间,实现了无需充电的纯电动驱动技术。
8. 最高时速 20/40 公里/小时,配备内置收缩式制动器和电磁制动器。
9. 车身周围预留了自动驾驶和导航模块,专为超视距自动驾驶而设计。
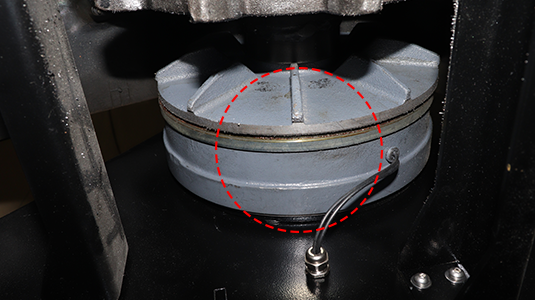
内部收缩制动器
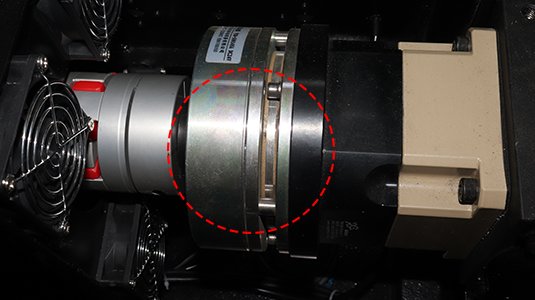
电磁制动器
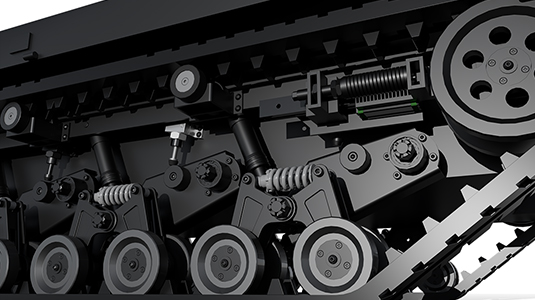
克里斯蒂和玛蒂尔达复合减震设计,适应40公里/小时的高速运行
预留的自动驾驶和导航模块
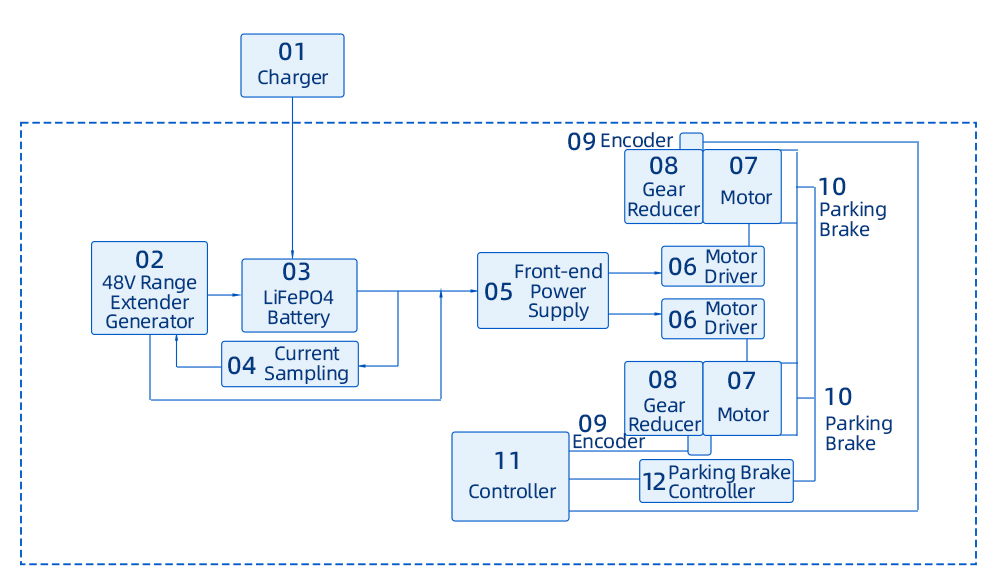
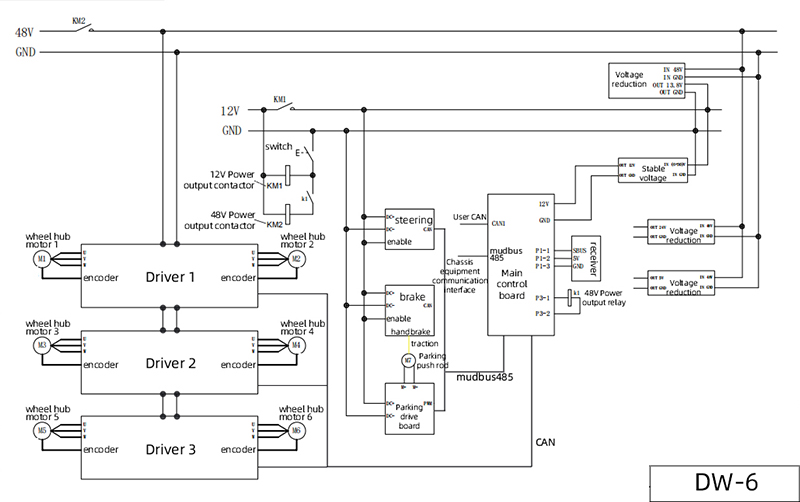
接线图——E-Power系统
01. 充电器
02. 48V增程发电机
03. 磷酸铁锂电池
04. 电流采样器
05. 前端电源
06. 电机驱动器
07. 电机
08. 减速器
09. 编码器
10. 驻车制动器
11. 控制器
12. 驻车制动控制器

A01
手持遥控器
遥控距离700-800 米(空旷区域)
10个通道
支持数据/视频传输

A01-V
手持式遥控器,带单视频显示屏,
遥控距离 700-800 米,
可视距离 400 米(空旷区域),
12 个频道
(可选)
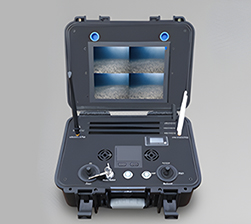
A02
控制盒,带4个屏幕,
遥控距离500米,
可视距离200米(空旷区域),4路有线视频信号,可选配 PWM 转向器控制信号(最多13路信号)

A02Pro
控制盒,配备4个屏幕,
遥控距离 500 米,
可视距离 200 米(空旷区域),
4 路有线视频信号,可选配 PWM 转向器控制信号(最多 13 路信号),
新增陀螺仪:具备底盘3D姿态、俯仰角和倾斜角显示功能
(可选)
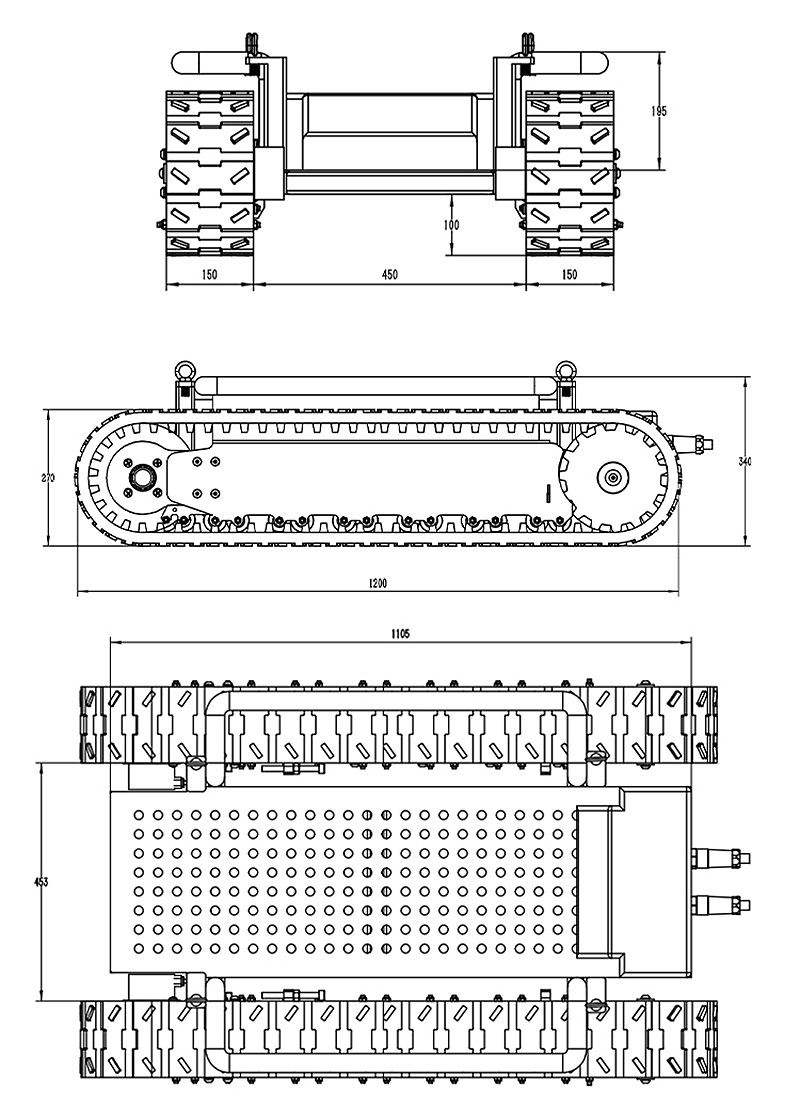
详细图纸:
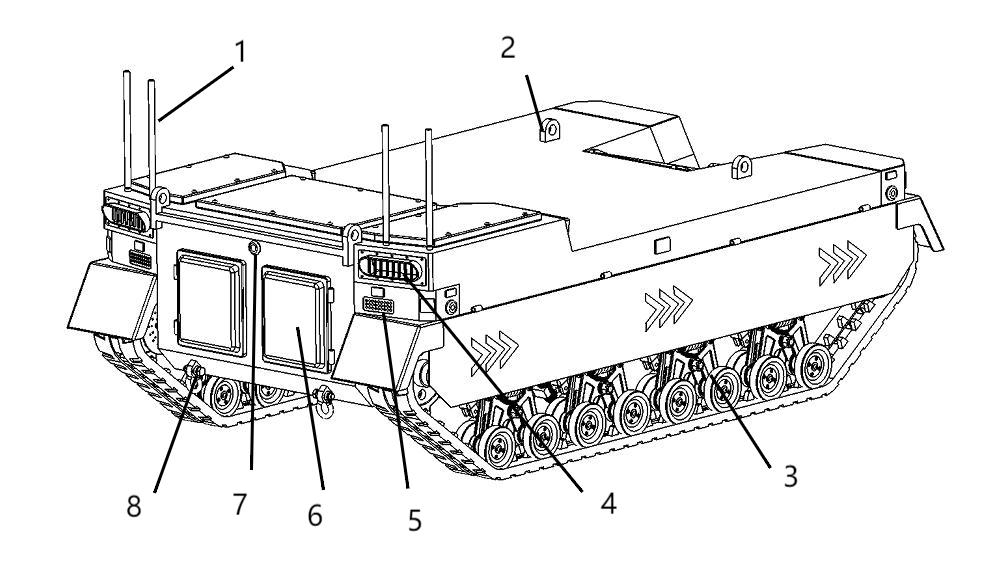
1. 天线 2. 吊钩 3. 减震器 4. 出风口 5. 尾灯 6. 后门
7. 摄像头 8. 后拖车钩
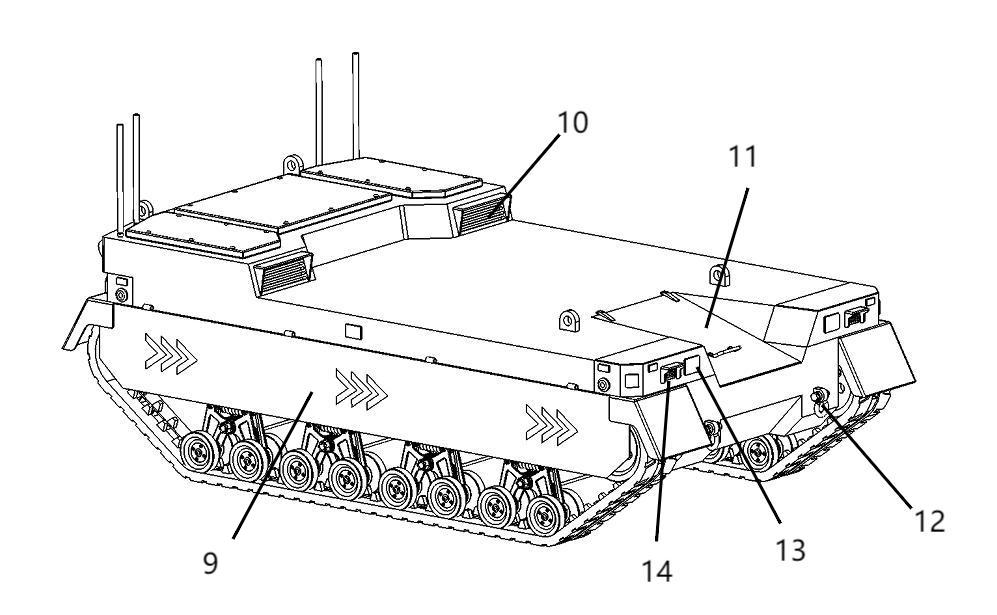
9. 侧盖板 10. 进气口 11. 前盖 12. 前拖车钩 13. 摄像头 14. 前大灯
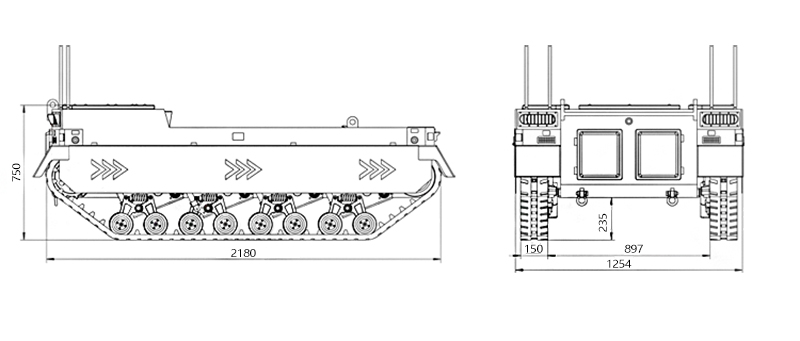
参数:
| 参数项目 | 技术参数 | 参数项目 | 技术参数 |
| 外形尺寸 | 2300*1250*750mm | 电池仓内部空间 | 700*600*300mm |
| 自重(不含电池) | 500kg | 行驶速度 | 20/ 40km/h |
| 驱动轮直径 | 260mm | 设计载荷 | 300kg |
| 履带宽度 | 150mm | 减速比 | 1:7.5-1:20 |
| 电机额定电压 | DC560V | 电机功率 | 8KW*2/ 16KW*2 |
| 电机额定转速 | 150-6000r/min (变频调速) |
爬坡能力 | ≤30°(具备爬楼梯功能) |
| 防护等级 | IP65 | 最小离地间隙 | 235mm |
| 越障高度 | 300mm | 最大跨沟宽度 | 600mm |
| 最大接地长度 | 1360mm | 最大工作电流 | 400A |
| 最大电池容量 | 48v 600AH E-POWER |
纯电持续工作时间 | 3h |
| 工作环境要求 | 海拔5000米以下;相对湿度0%-90% RH,允许结露(在25℃环境下) | 工作温度范围 | -10-60℃ |
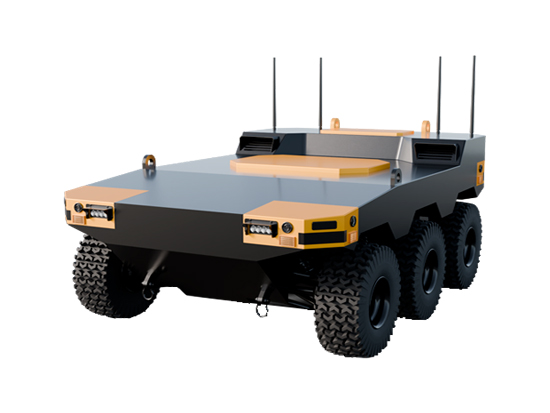
DW-6 轮式机器人底盘
DW-6 是一款全新设计的 6X6 重载高速轮式机器人底盘。
◆ 应用
广泛应用于救援机器人、安全防护监控、机械臂搬运器、升降平台、运输车辆等领域。
特点:
1. 提供两种转向方式:阿克曼转向和差速转向,实现灵活的转向和流畅的行驶;六轮独立悬架能够有效过滤路面不平带来的振动,确保车辆保持稳定的姿态。
2. 动力系统采用6×6配置,每个车轮均配备独立的动力系统。车辆动力强劲,牵引能力出色,能够适应各种复杂的路况。
3. 车辆配备可扩展平台,可搭载适用于不同领域的各种应用模块。
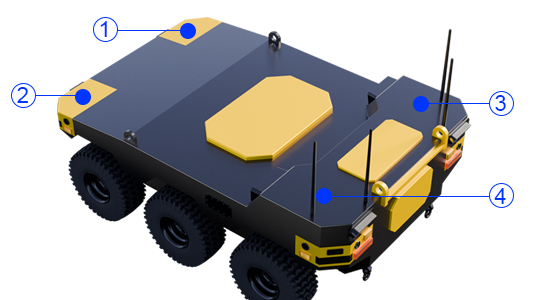
预留的自动驾驶和导航模块
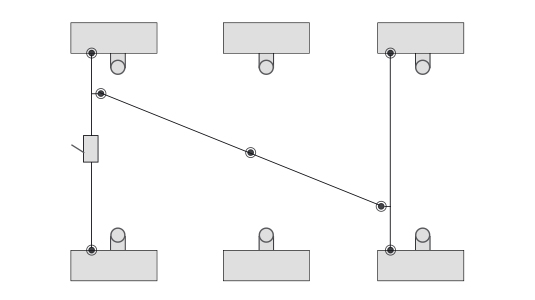
结构图
控制模式:
A01
手持遥控器
遥控距离700-800 米(空旷区域)
10个通道
支持数据/视频传输
A01-V
手持式遥控器,带单视频显示屏,
遥控距离 700-800 米,
可视距离 400 米(空旷区域),
12 个频道
(可选)
A02
控制盒,带4个屏幕,
遥控距离500米,
可视距离200米(空旷区域),4路有线视频信号,可 选配 PWM 转向器控制信号(最多13路信号)
A02Pro
控制盒,配备4个屏幕,
遥控距离 500 米,
可视距离 200 米(空旷区域),
4 路有线视频信号,可选配 PWM 转向器控制信号(最多 13 路信号),
新增陀螺仪:具备底盘3D姿态、俯仰角和倾斜角显示功能
(可选)
| 参数项目 | 技术参数 | 参数项目 | 技术参数 |
| 外形尺寸 | 1650*1050*700毫米 | 内部电池空间 | 520*800*200mm (可分散布置以增加整体容量) |
| 自重 | 300公斤(不含电池) | 速度 | 20/40/60 公里/小时 |
| 轮胎 | 15*6-6 | 设计载荷 | 300公斤 |
| 额定电机转速 | 400-1600转/分 | 齿轮比 | 1:8-1:40 |
| 电机功率 | 6倍(2-4)千瓦 | 输出扭矩 | (40-160)×6 纳米 |
| 防水的 | IP65 | 攀爬能力 | 30° |
| 离地间隙 | 190毫米 | 工作温度 | -10-60℃ |
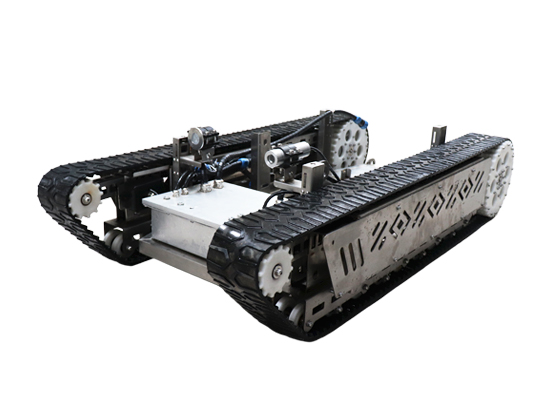
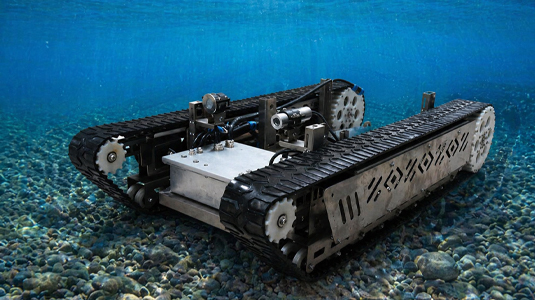
AVA-U12水下机器人底盘
主要用于最大 50 米(定制可达 200 米)的水下作业,并提供二次开发和定制服务。
◆ 应用
水下疏浚,水下检测。
特点:
1. 采用IP68防水底盘和油封电机,适用于水下50米(可定制200米)作业。
2. 安装空间大,可安装更多设备。
3. 橡胶履带,接地力强,接地面积大。
4. 采用高压驱动,可实现超长电缆控制(标准电缆控制距离50米,最长600米)。可配备自动电缆卷收器,实现电缆自动收放。
5. 可配备虹吸式泥浆泵、扩孔器、高压水枪、机械臂等工具。
6. 可选配:单通道或四通道遥控盒。
7. 可选配:IP68水下摄像机,实现可视操作。
8. 可选配:自动电缆卷收器,可实现电缆自动收放,内置120Ah电池仓,具备电池逆变器功能,兼容市电和电池供电。
9. 动力驱动轨道组件采用模块化设计,支持框架尺寸调整,以适应不同的工作条件。它配备100毫米宽的轨道,以更好地适应狭小空间作业。
油浸式马达,IP68防水等级,最大水下作业深度50米

主控箱
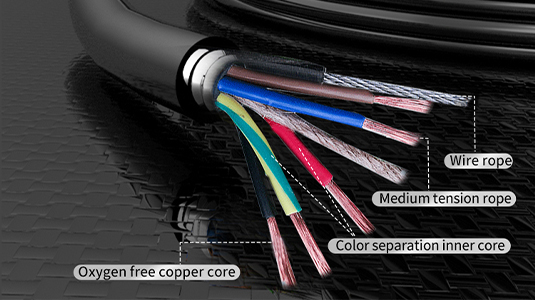
高品质控制电缆,标准长度50米,最长可达600米

电源系统:电池/发电机/380V交流电
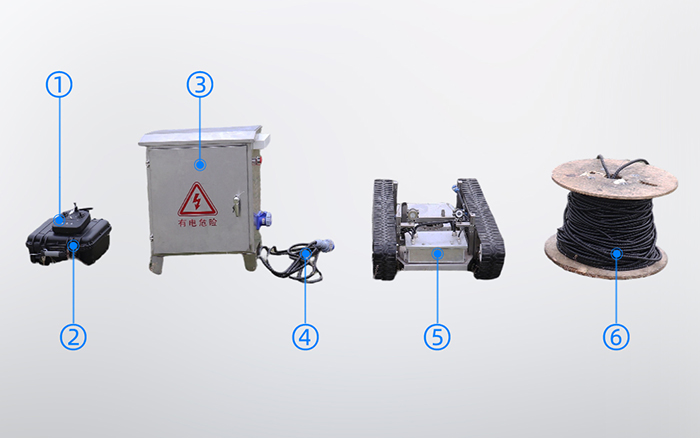
① 遥控器 ② 遥控盒 ③ 配电盒 ④ 电源线 ⑤ AVA-U12 机器人底盘 ⑥ 电缆
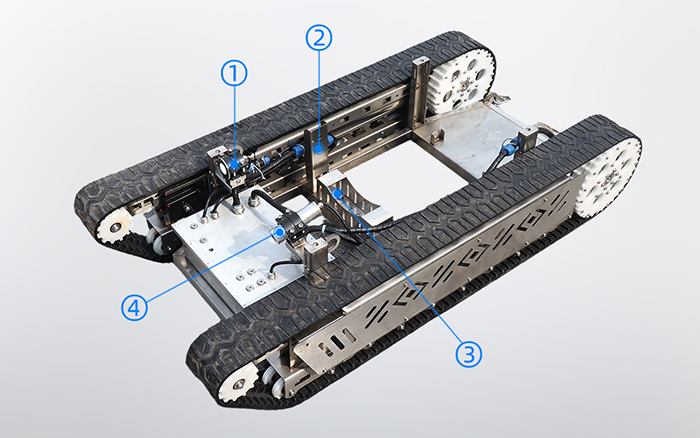
① LED工作灯 ② 水泵限位支架 ③ 水泵安装支架 ④ 摄像头
① 前拖车点
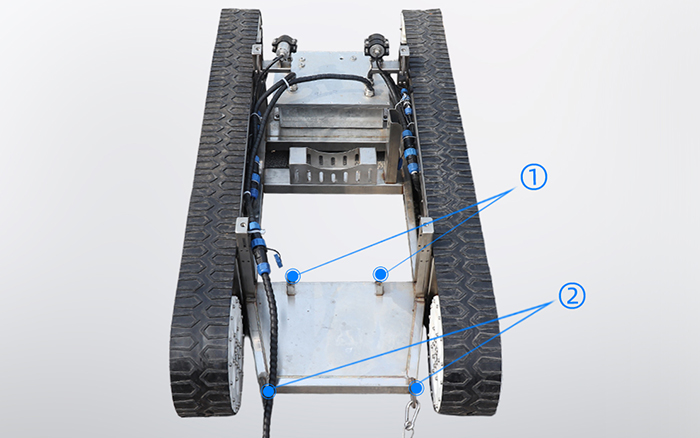
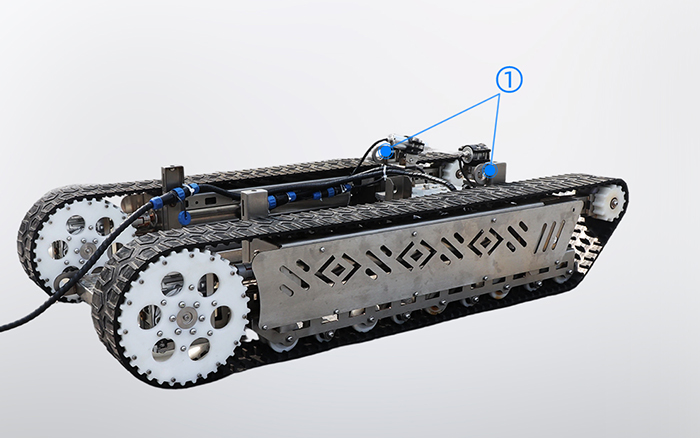
① 前水泵电缆扎带支架 ② 后拖车钩

① 操纵杆控制底盘前进、后退、左转和右转 ② 遥控器上的电源开/关按钮

①充电接口 ②触摸板 ③电源开关 ④天线插槽 ⑤USB接口 ⑥天线底座 ⑦电池电量显示 ⑧机身方向摇杆
产品尺寸: