

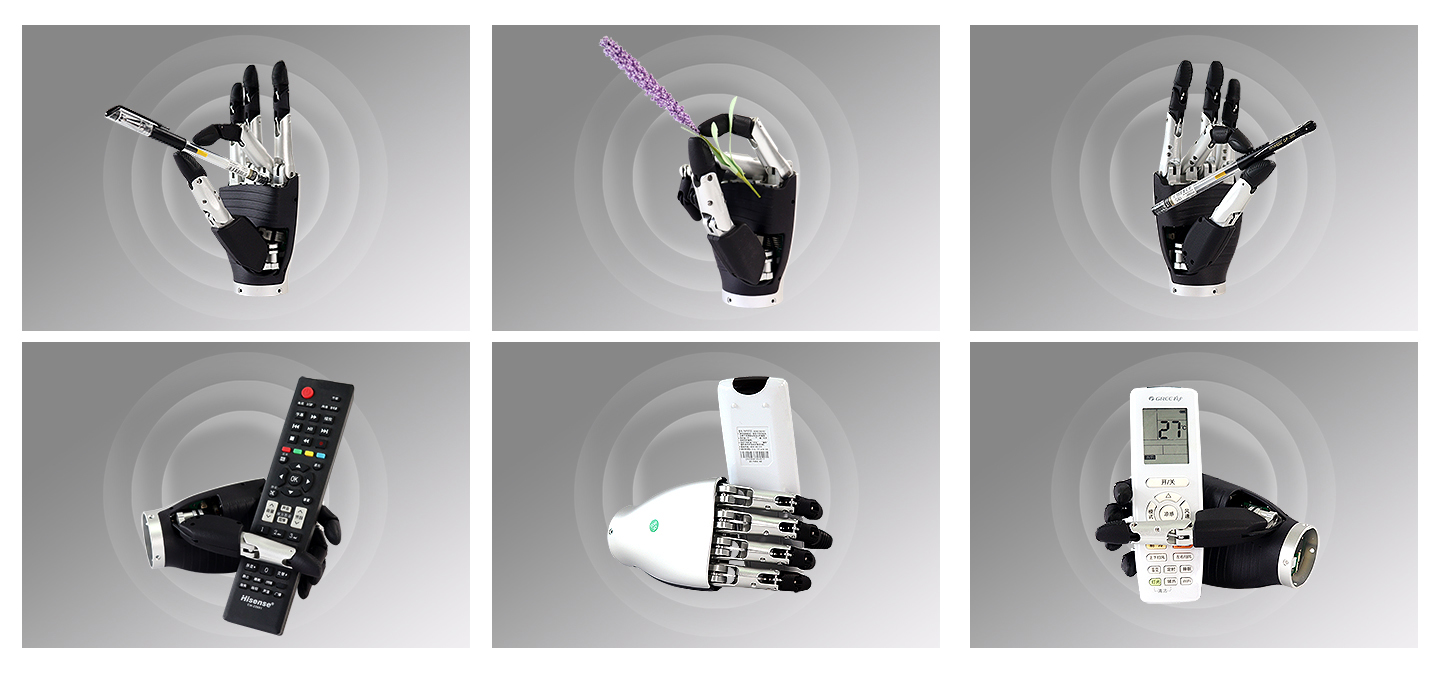
灵巧机械手
Avatar智能仿生手结合了仿生学、机电一体化、材料科学、生物医学和信息技术,配备了自主研发的运动控制技术,灵巧的机器人手也能像人手一样灵活。
◆ 应用
此类灵巧手可作为机械臂的末端执行单元,提升其在非结构化环境中的适应性;也可集成于类人机器人本体,使其具备更自然的人机交互能力;在教育操控者场景中,它常被用于高校或研究机构的机器人课程,帮助学生理解运动学、动力学与控制理论;而在打包与地点处理环节,其高精度抓取能力可胜任物流分拣、精密装配等任务,尤其适合需要柔性操作的自动化产线。

T ARM 系列机械臂
T系列机械臂是一款小巧、灵活且高度协作的机械臂。支持ROS、PYBULET、Raspberry Pi、PYTHON、C++;API提供友好的用户界面,包括与多个集成机器人关节执行器进行以太网通信,可同时向多个执行器发送指令或获取执行器状态和参数信息。开发环境:C++、Ubuntu 18.0
◆ 应用
工业制造、新零售/服务、研究和教育、医疗保健、危险作业、复合机器人、医疗保健、物流和仓储、农业、太空探索、危险环境处理。

TD系列机器人关节执行器
TD系列机器人关节执行器是一款紧凑轻巧的集成式机器人关节执行器,它将超薄谐波减速器、FOC伺服控制器、高效无刷力矩电机、集成式制动器和高精度多圈绝对式编码器集成于一个高度集成的模块中。
◆ 应用
该执行器可为类人机器人、四足机器人、协作机器人和智能自动化设备等先进机器人应用提供高扭矩密度、精确的运动控制和可靠的性能。

SP系列机器人关节执行器
SP(伺服行星)系列行星机器人关节模块是由阿凡达机器人公司研发生产的集成式伺服关节执行器。SP行星机器人关节模块是一款高度集成的微型伺服关节,集成了精密行星减速器、力矩电机和专业伺服驱动器,形成驱动控制一体化系统。行星关节通过CAN总线串联连接,布线简单易操作,整体机器人关节故障率低。
◆ 应用
行星减速器体积小、扭矩大,特别适用于仿生机器人、仿生动物、教育机器人手臂等多关节组合应用场景;同时,由于其高性价比和性能稳定,该集成式行星伺服关节执行器可以替代多种无刷电机和大扭矩转向器。